

metadata
license: etalab-2.0
pipeline_tag: image-segmentation
tags:
- semantic segmentation
- pytorch
- landcover
model-index:
- name: FLAIR-HUB_LC-A_convnextv2base-unet
results:
- task:
type: semantic-segmentation
dataset:
name: IGNF/FLAIR-HUB/
type: earth-observation-dataset
metrics:
- type: mIoU
value: 64.162
name: mIoU
- type: OA
value: 77.166
name: Overall Accuracy
- type: IoU
value: 84.153
name: IoU building
- type: IoU
value: 76.218
name: IoU greenhouse
- type: IoU
value: 61.59
name: IoU swimming pool
- type: IoU
value: 75.239
name: IoU impervious surface
- type: IoU
value: 56.174
name: IoU pervious surface
- type: IoU
value: 63.016
name: IoU bare soil
- type: IoU
value: 88.96
name: IoU water
- type: IoU
value: 72.539
name: IoU snow
- type: IoU
value: 54.219
name: IoU herbaceous vegetation
- type: IoU
value: 57.088
name: IoU agricultural land
- type: IoU
value: 36.271
name: IoU plowed land
- type: IoU
value: 77.468
name: IoU vineyard
- type: IoU
value: 71.327
name: IoU deciduous
- type: IoU
value: 60.427
name: IoU coniferous
- type: IoU
value: 29.305
name: IoU brushwood
library_name: pytorch
🌐 FLAIR-HUB Model Collection
- Trained on: FLAIR-HUB dataset 🔗
- Available modalities: Aerial images, SPOT images, Topographic info, Sentinel-2 yearly time-series, Sentinel-1 yearly time-series, Historical aerial images
- Encoders: ConvNeXTV2, Swin (Tiny, Small, Base, Large)
- Decoders: UNet, UPerNet
- Tasks: Land-cover mapping (LC), Crop-type mapping (LPIS)
- Class nomenclature: 15 classes for LC, 23 classes for LPIS
🔍 Model: FLAIR-HUB_LC-A_convnextv2base-unet
- Encoder: convnextv2_base
- Decoder: unet
- Metrics:
- Params.: 92.8
General Informations
- Contact: [email protected]
- Code repository: https://github.com/IGNF/FLAIR-HUB
- Paper: https://arxiv.org/abs/2506.07080
- Project page: https://ignf.github.io/FLAIR/FLAIR-HUB/flairhub
- Developed by: IGN
- Compute infrastructure:
- software: python, pytorch-lightning
- hardware: HPC/AI resources provided by GENCI-IDRIS
- License: Etalab 2.0
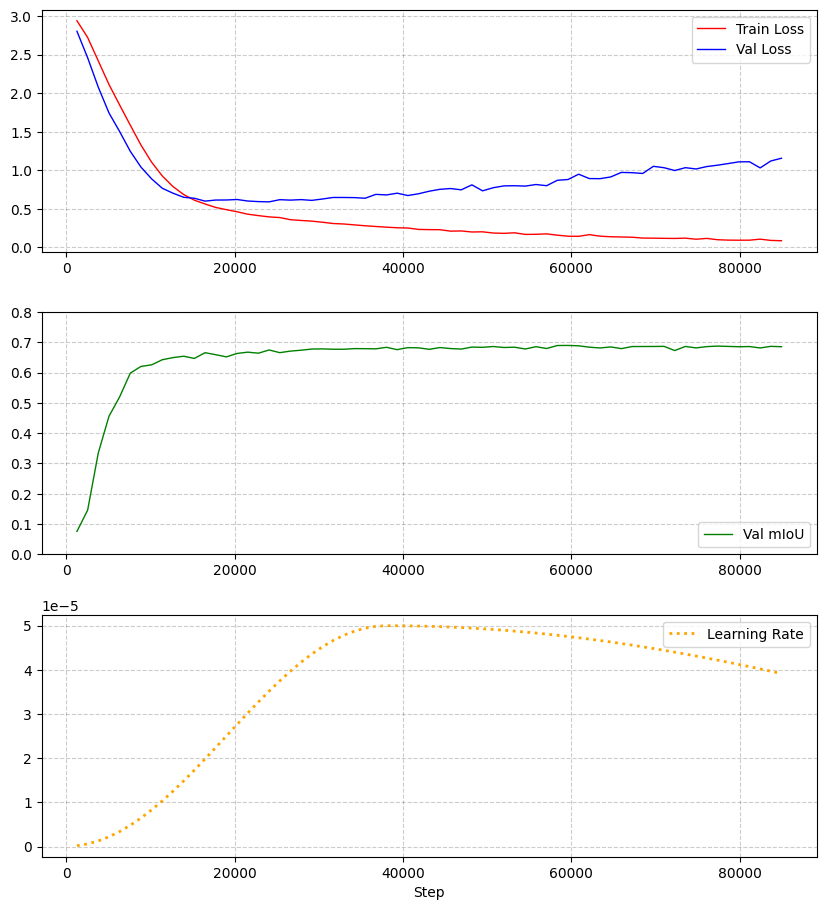
Training Config Hyperparameters
- Model architecture: convnextv2_base-unet
- Optimizer: AdamW (betas=[0.9, 0.999], weight_decay=0.01)
- Learning rate: 5e-5
- Scheduler: one_cycle_lr (warmup_fraction=0.2)
- Epochs: 150
- Batch size: 5
- Seed: 2025
- Early stopping: patience 20, monitor val_miou (mode=max)
- Class weights:
- default: 1.0
- masked classes: [clear cut, ligneous, mixed, other] → weight = 0
- Input channels:
- AERIAL_RGBI : [4,1,2]
- Input normalization (custom):
- AERIAL_RGBI:
mean: [106.59, 105.66, 111.35]
std: [39.78, 52.23, 45.62]
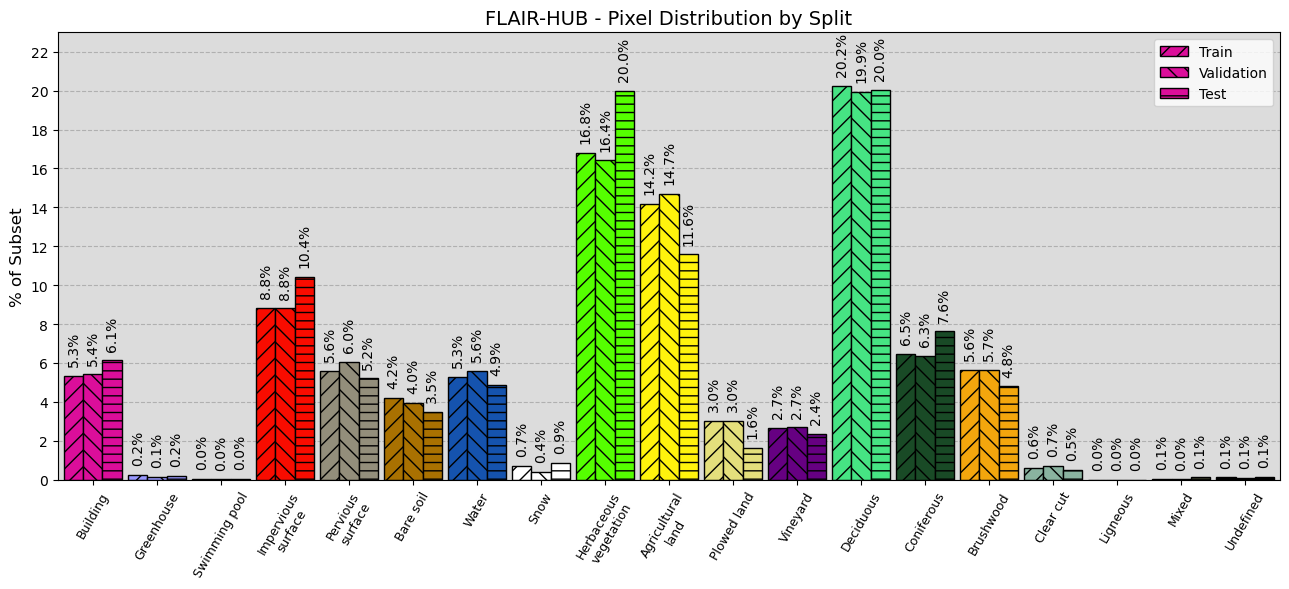
Training Data
- Train patches: 152225
- Validation patches: 38175
- Test patches: 50700
Training Logging
Metrics
| Metric | Value |
|---|---|
| mIoU | 64.13% |
| Overall Accuracy | 77.45% |
| F-score | 76.88% |
| Precision | 77.36% |
| Recall | 76.89% |
| Class | IoU (%) | F-score (%) | Precision (%) | Recall (%) |
|---|---|---|---|---|
| building | 84.15 | 91.39 | 91.15 | 91.64 |
| greenhouse | 76.22 | 86.50 | 84.11 | 89.04 |
| swimming pool | 60.03 | 75.02 | 76.08 | 73.99 |
| impervious surface | 75.24 | 85.87 | 86.75 | 85.01 |
| pervious surface | 56.17 | 71.94 | 69.87 | 74.14 |
| bare soil | 63.02 | 77.31 | 74.19 | 80.71 |
| water | 88.96 | 94.16 | 94.98 | 93.35 |
| snow | 72.54 | 84.08 | 97.77 | 73.76 |
| herbaceous vegetation | 54.22 | 70.31 | 71.67 | 69.01 |
| agricultural land | 57.09 | 72.68 | 69.75 | 75.87 |
| plowed land | 36.27 | 53.23 | 52.71 | 53.77 |
| vineyard | 77.47 | 87.30 | 85.34 | 89.36 |
| deciduous | 71.33 | 83.26 | 81.90 | 84.67 |
| coniferous | 60.43 | 75.33 | 80.13 | 71.08 |
| brushwood | 29.30 | 45.33 | 47.34 | 43.48 |
Inference
Aerial ROI

Inference ROI

Cite
BibTeX:
@article{ign2025flairhub,
doi = {10.48550/arXiv.2506.07080},
url = {https://arxiv.org/abs/2506.07080},
author = {Garioud, Anatol and Giordano, Sébastien and David, Nicolas and Gonthier, Nicolas},
title = {FLAIR-HUB: Large-scale Multimodal Dataset for Land Cover and Crop Mapping},
publisher = {arXiv},
year = {2025}
}
APA:
Anatol Garioud, Sébastien Giordano, Nicolas David, Nicolas Gonthier.
FLAIR-HUB: Large-scale Multimodal Dataset for Land Cover and Crop Mapping. (2025).
DOI: https://doi.org/10.48550/arXiv.2506.07080