
Submitted by
 BoZhang
BoZhang
BoZhangGet trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
BoZhang
 Xiaoye08
Xiaoye08
 dongguanting
dongguanting
 wenhu
wenhu
 Liang0223
Liang0223
 DongfuJiang
DongfuJiang
 gogoduan
gogoduan
 yyyou
yyyou
 ChenyuZheng
ChenyuZheng
 i-udovichenko
i-udovichenko
 Franck-Dernoncourt
Franck-Dernoncourt
 ychenNLP
ychenNLP
 yanyc
yanyc
 tricktreat
tricktreat
 taesiri
taesiri
 nthakur
nthakur
 rp-yu
rp-yu
 XuankunRong
XuankunRong
 julianjuaner
julianjuaner
 KaituoFeng
KaituoFeng
 weizhepei
weizhepei
 haoningwu
haoningwu
 jacklishufan
jacklishufan
 zhangchenxu
zhangchenxu
 KevinQHLin
KevinQHLin
 Siyuanyuan
Siyuanyuan
 xw-eric
xw-eric
 hcwei
hcwei
 Kikkk
Kikkk
 ilgee
ilgee
 xhyandwyy
xhyandwyy
 ryokamoi
ryokamoi
 RunsenXu
RunsenXu xw-eric
xw-eric
 sagnikM
sagnikM
 MING-ZCH
MING-ZCH
 keplerccc
keplerccc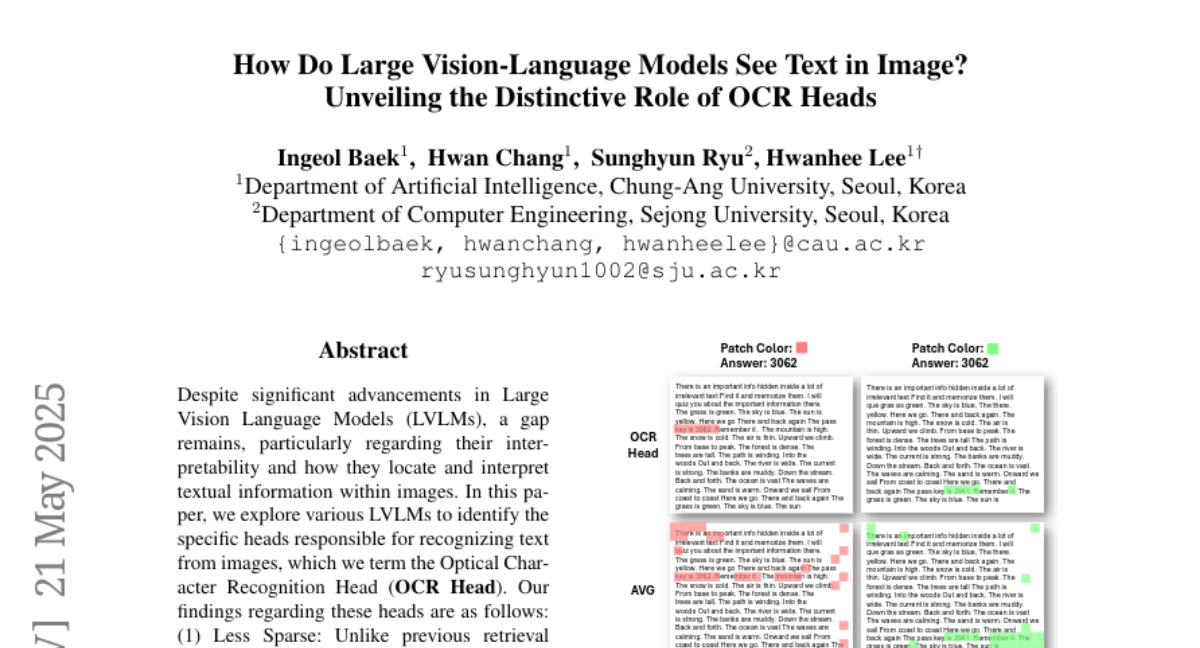
 ingeol
ingeol
 jaagli
jaagli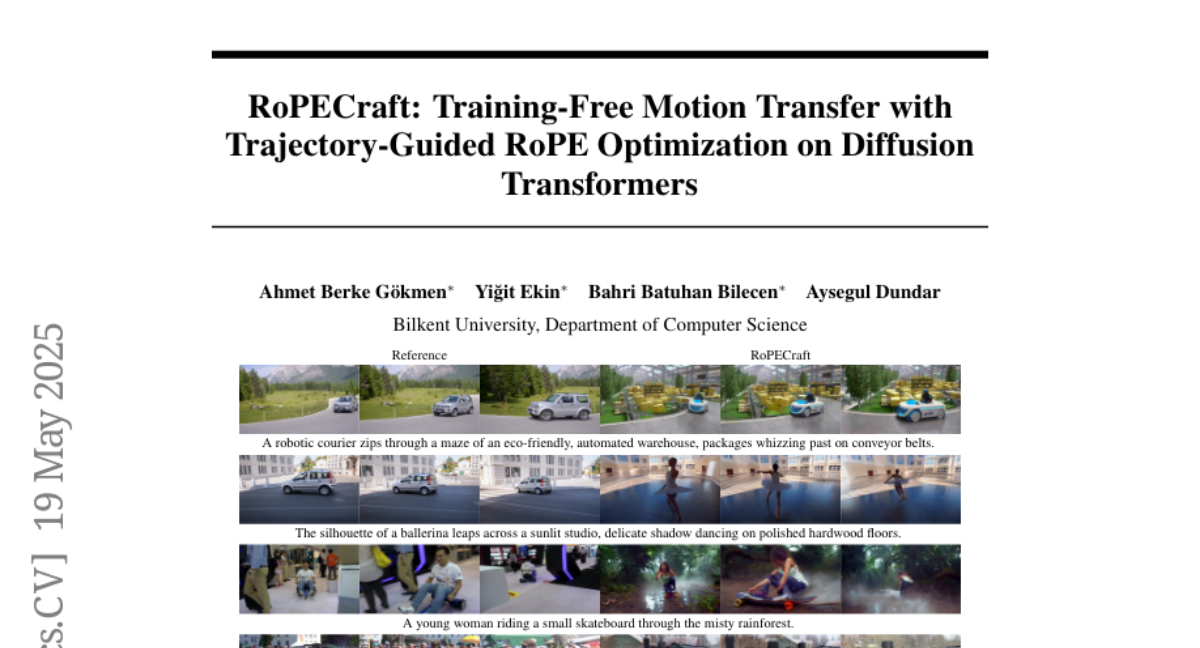
 berkegokmen1
berkegokmen1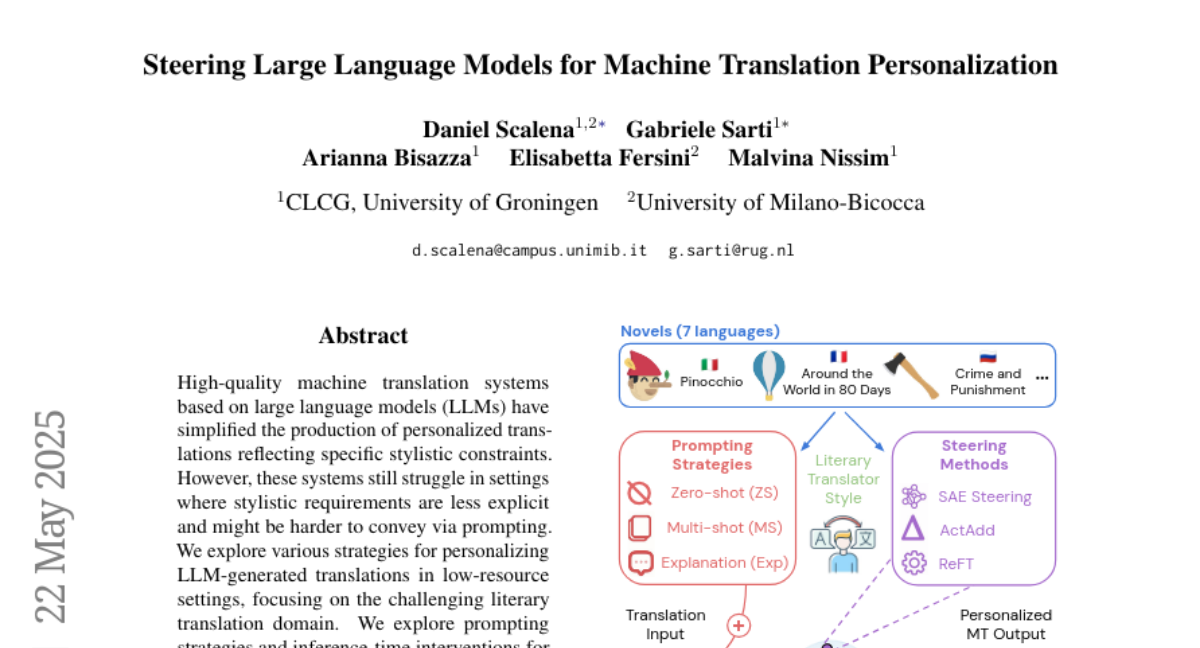
 gsarti
gsarti
 ayyyq
ayyyq
 gagan3012
gagan3012
 reachomk
reachomk
 seyoungsong
seyoungsong
 philippds
philippds
 zenyn
zenyn





