
Modularized Cross-Embodiment Transformer (MXT) – Pretrained Models from Human2LocoMan
![]()
Yaru Niu1,*
Yunzhe Zhang1,*
Mingyang Yu1
Changyi Lin1
Chenhao Li1
Yikai Wang1
Yuxiang Yang2
Wenhao Yu2
Tingnan Zhang2
Zhenzhen Li3
Jonathan Francis1,3
Bingqing Chen3
Jie Tan2
Ding Zhao1
1Carnegie Mellon University
2Google DeepMind
3Bosch Center for AI
*Equal contributions
Robotics: Science and Systems (RSS) 2025
Website |
Paper |
Code
Model Description
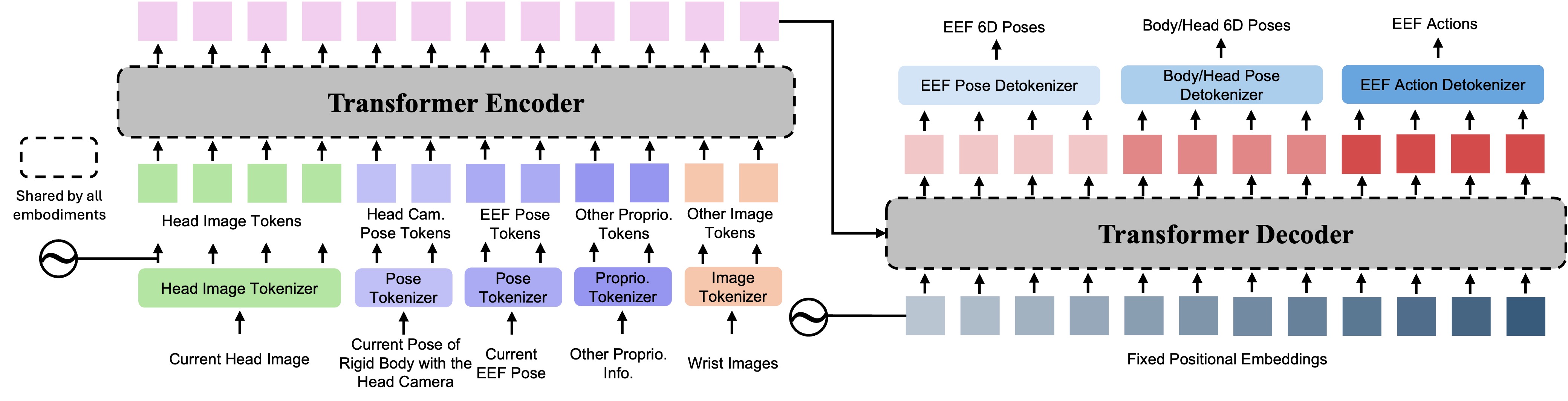
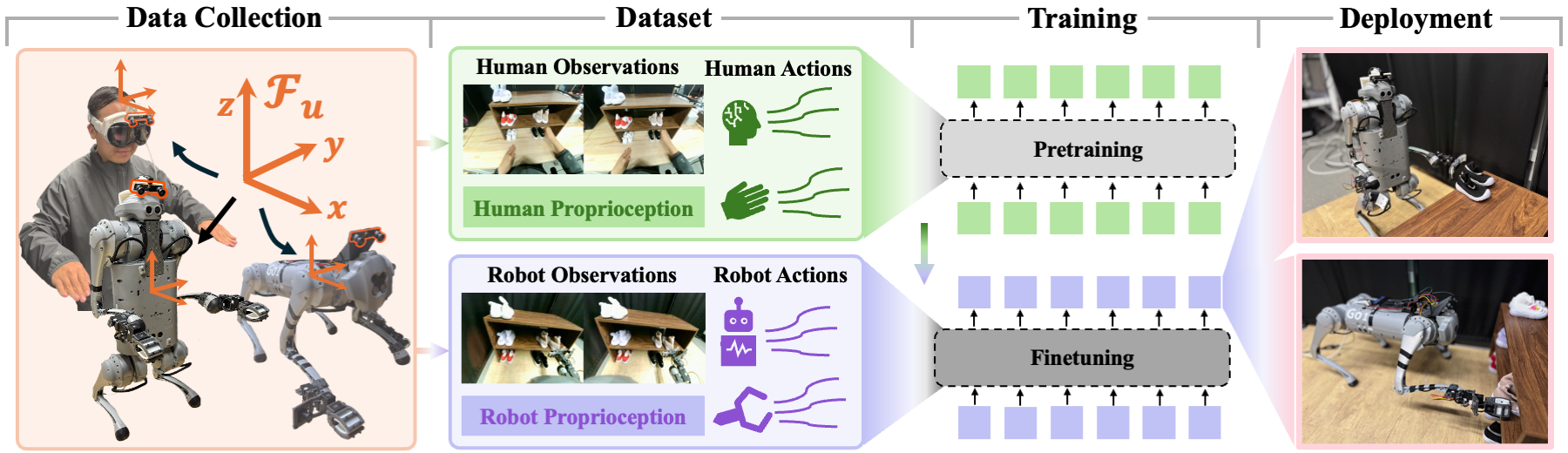
Our learning framework is designed to efficiently utilize data from both human and robot sources, and account for modality-specific distributions unique to each embodiment. We propose a modularized design Modularized Cross-Embodiment Transformer (MXT). MXT consists mainly of three groups of modules: tokenizers, Transformer trunk, and detokenizers. The tokenizers act as encoders and map embodiment-specific observation modalities to tokens in the latent space, and the detokenizers translate the output tokens from the trunk to action modalities in the action space of each embodiment. The tokenizers and detokenizers are specific to one embodiment and are reinitialized for each new embodiment, while the trunk is shared across all embodiments and reused for transferring the policy among embodiments.
We provide MXT checkpoints pretrained on human data, along with their corresponding config files. Specifically, pour.ckpt is pretrained on the human pouring dataset; scoop.ckpt on the human scooping dataset; shoe_org.ckpt on the human unimanual and bimanual shoe organization dataset; and toy_collect.ckpt on the human unimanual and bimanual toy collection dataset.
Citation
If you find this work helpful, please consider citing the paper:
@inproceedings{niu2025human2locoman,
title={Human2LocoMan: Learning Versatile Quadrupedal Manipulation with Human Pretraining},
author={Niu, Yaru and Zhang, Yunzhe and Yu, Mingyang and Lin, Changyi and Li, Chenhao and Wang, Yikai and Yang, Yuxiang and Yu, Wenhao and Zhang, Tingnan and Li, Zhenzhen and Francis, Jonathan and Chen, Bingqing and Tan, Jie and Zhao, Ding},
booktitle={Robotics: Science and Systems (RSS)},
year={2025}
}