## Usage
Inference with unsloth
```python
from unsloth import FastVisionModel
from PIL import Image
from transformers import TextStreamer
model, processor = FastVisionModel.from_pretrained(
'SakalYin/llava-v1.6-mistral-7b-RobotArm',
load_in_4bit=True,
local_files_only=True,
attn_implementation="flash_attention_2",
)
def resize_image(image_input, size=None):
"""Load image from path or matrices and resize them"""
size = size if size else (854,480)
if isinstance(image_input, str):
image = Image.open(image_input)
else:
image = image_input
size = size if size else (854,480)
image = image.resize(size).convert('RGB')
return image
image_path = "https://i.imgur.com/vAleq1e.png"
size = (854, 480) # Recommeded Size
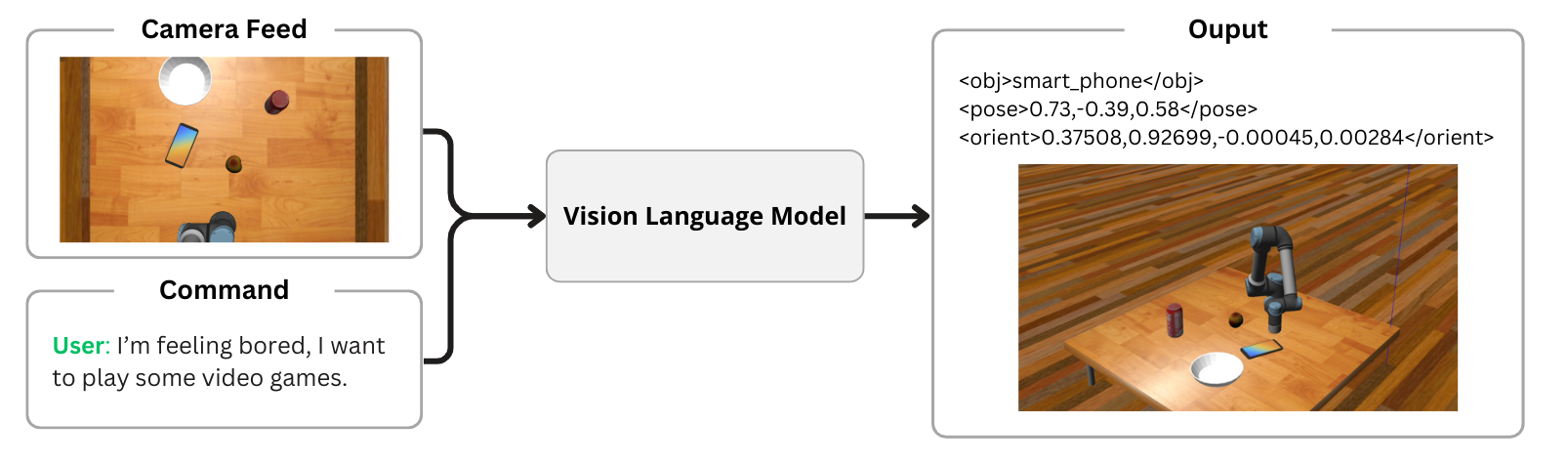
system_message = "You are a Visual Language Model Trained to output robot arm end-effectors parameters. Base on the user requests, locate the appropriate object in the image and you must return the position and orientation to reach it in xml format."
prompt = "Give me a cup."
image = resize_image(image_path, size=size)
messages = [
{
"role": "system",
"content": [{"type": "text", "text": system_message if system_message else "You are a helpful assistant."}],
},
{"role": "user", "content": [
{"type": "image"},
{"type": "text", "text": prompt}]
}
]
input_text = processor.apply_chat_template(messages, add_generation_prompt=True)
inputs = processor(
image,
input_text,
add_special_tokens=False,
return_tensors="pt",
).to("cuda")
# Generate text without using the streamer
text_streamer = TextStreamer(processor, skip_prompt=True)
generated_tokens = model.generate(
**inputs,
streamer=text_streamer,
max_new_tokens=128,
use_cache=True,
temperature=1.5,
min_p=0.1
)
# Decode output properly
output_text = processor.decode(generated_tokens[0], skip_special_tokens=True).strip()
```
**Output**: \
Model
Euclidean
X MSE
Y MSE
Z MSE
Roll Error
Pitch Error
Yaw Error
Qwen2VL-2B (Trained with Camera Location)
0.1089
0.0505
0.0575
0.0363
6.8334
5.4204
6.7619
Qwen2VL-2B
0.3865
0.1239
0.3411
0.0000
2.1462
0.9029
1.1926
Qwen2VL-7B
0.0509
0.0305
0.0320
0.0008
0.4148
0.1066
0.1734
LlaVA-NeXT 7B
0.0480
0.0306
0.0296
0.0000
0.0000
0.0000
0.0000
Llama Vision 11B
-
-
-
-
-
-
-